UAV Path Planner For Emergency Response
As part of my Masters thesis work at UC, Santa Cruz, I created an open-source path planning tool for fixed-wing UAVs (Dubins vehicles) called: Dubins Path Planner Library (DPPL). It is used in emergency response applications, such as wildfire tracking and search and rescue, where shortest point-to-point tours and shortest area coverage routes are needed.
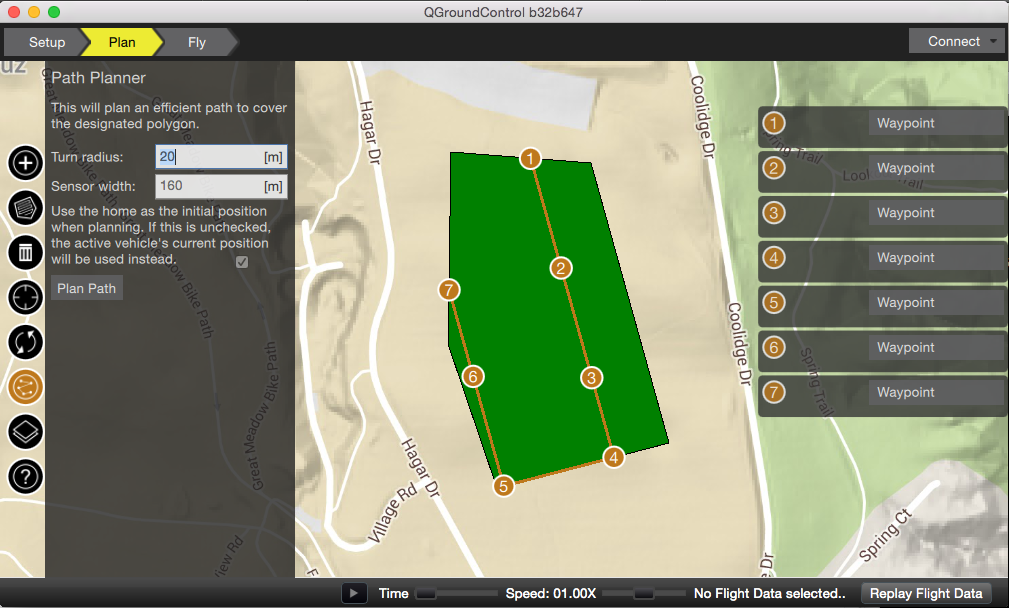
An interface was created for QGroundControl (seen below in Figure 1) that allows for both reordering a set of waypoints to produce a shortest path for a Dubins vehicle of specified maximum turn radius (derived from a fixed bank angle and velocity), and a shortest lawn-mower-like route to cover a non-convex polygonal region with a given coverage width (for a camera the width is determined by: a fixed altitude, the resolution and width of images, and the focal length).
We tested DPPL with a fixed-wing UAV at UC, Santa Cruz. Figure 2 shows our setup with the UAV and a laptop running QGroundControl.
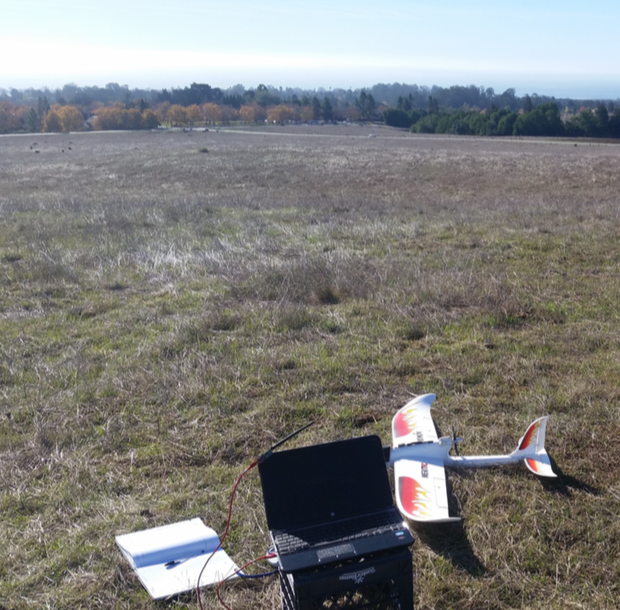
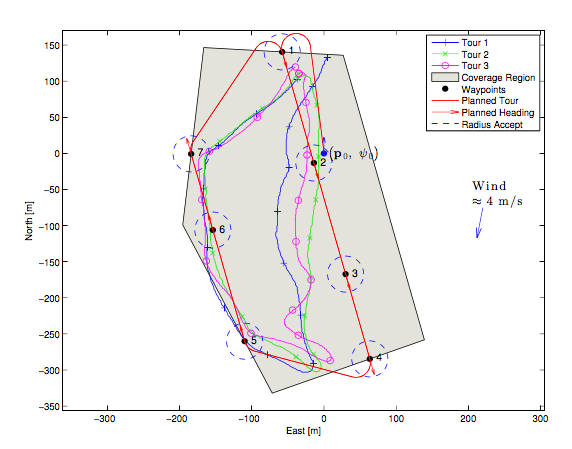
Figure 3 shows the result of flying our UAV with the coverage route from Figure 1. Wind was a significant issue in the tests. We could do much better with a simple static wind offset in the path planner–one of the many features left for future work.
The project was released open source under an MIT license. QGroundControl is available under the Apache 2.0 and GPLv3 licenses. Please contact me if you are interested in obtaining a copy of the original report or conference paper.
Here are some links to the project:
- DPPL Website: http://dagoodma.github.io/dppl_code
- DPPL Code: https://github.com/dagoodma/dppl_code
- DPPL Interface Add-in for QGC: https://github.com/dagoodma/qgroundcontrol/tree/dpp_addon_dtspascpp
- DPPL MATLAB Code (for analysis and plotting): https://github.com/dagoodma/dppl_matlab
- QGC Code: https://github.com/mavlink/qgroundcontrol